Depth Map Automatic Generator 2 (DMAG2) automatically generates two disparity maps and two occlusion maps for a given stereo pair. The algorithm is one local method among many
stereo matching local methods. The program computes two disparity maps, performs a left-right consistency check to get the occlusions for each disparity map, and finally fills the occlusions in each disparity map. When DMAG2 finishes (it will show the left and right disparity maps as well as the left and right occlusion maps in four separate windows), you can save the left and right disparity maps as well as the left and right occlusion maps.
DMAG2 is an implementation of the algorithm presented in "Adaptive Support-Weight Approach for Correspondence Search" by Kuk-Jin Yoon et al. Have a look at
Weighted Windows for Stereo Matching since I kinda explain there how the matching cost is computed. I changed the code on 03/17/15 so that the matching cost is now the same as the one used in
Depth Map Automatic Generator 5 (DMAG5).
Let's go over the parameters that control DMAG2's behavior:
- Minimum disparity is the disparity corresponding to the furthest point in the background.
- Maximum disparity is the disparity corresponding to the closest point in the foreground.
I suggest using
Disparity Finder 2 (DF2) to get the minimum and maximum disparity. Better yet, you can use
Epipolar Rectification 9b (ER9b) to rectify/align the two images (crucial for good quality depth map generation) and get the min and max disparities automatically.
- Window radius is the guided filter size. The larger the radius, the more accurate the matches are supposed to be (to a certain extent). If the window radius becomes too large, errors are likely to appear at object boundaries. Note that the running time is not dependent on the window radius, which is a really good thing.
- Alpha is the term that balances the color matching cost and the gradient matching cost. The closer alpha is to 0, the more importance is given to the color. The closer alpha is to 1, the more importance is given to the gradient. In theory, a higher alpha works better when there's quite a bit of texture in the image while a lower alpha works better when the image is relatively flat color wise.
- Truncation value (color) limits the value the color matching cost can take. It reduces the effects of occluded pixels (pixels that appear in only one image).
- Truncation value (gradient) limits the value the gradient matching cost can take. It reduces the effects of occluded pixels (pixels that appear in only one image).
I tend to set the truncation value (color) to 20.0 or 30.0 and the truncation value (gradient) to 2.0. Feel free to experiment though!
- Gamma proximity controls the weight given to a neighboring pixel in terms of spatial distance. Typically, you want to give less weight to a neighboring pixel that's far away from the pixel under consideration than to a pixel that is close by. As gamma proximity goes to infinity, the weight becomes equal to unity for any neighboring pixel no matter how far it is. As gamma proximity goes to zero, the more the weight depends on the distance to the pixel under consideration.
- Gamma color (similarity) controls the weight given to a neighboring pixel in terms of color difference. Typically, you want to give less weight to a neighboring pixel that's far away in the color space from the pixel under consideration than to a pixel that is close by. As gamma color goes to infinity, the weight becomes equal to unity for any neighboring pixel no matter how far it is in the color space. As gamma color goes to zero, the more the weight depends on the distance in the color space to the pixel under consideration.
- Disparity tolerance (occlusion detection). The larger the value, the more mismatch is allowed (between left and right depth maps) before declaring that the disparity computed at a pixel is unreliable.
- Window radius (occlusion smoothing).
- Sigma space (occlusion smoothing).
- Sigma color (occlusion smoothing).
The parameters that relate to occlusion detection and smoothing should probably be left alone since they only have an effect on the "occluded" pixels, that is, the pixels that show up in black in the occlusion maps.
- Downsampling factor. This parameter enables DMAG2 to run faster by downsampling the images prior to computing the depth maps. If set to 1, the images are used as is and there's no speedup. If set to 2, the images are resized by reducing each dimension by a factor of 2 and DMAG2 should go 4 times faster. The more downsampling is requested, the faster DMAG2 will go, but the more pixelated the depth maps will look upon completion (as they are upsampled). If downsampling is turned on, the parameters that are spatial, that is, min and max disparity, window radius, gamma proximity, window radius (occlusion smoothing), and sigma space (occlusion smoothing) are automatically adjusted to adapt to the level of downsampling that is requested. In other words, you don't have to wonder if you should change those parameters when switching, for example, from downsampling factor = 1 to downsampling factor = 2 as DMAG2 does it automatically for you.
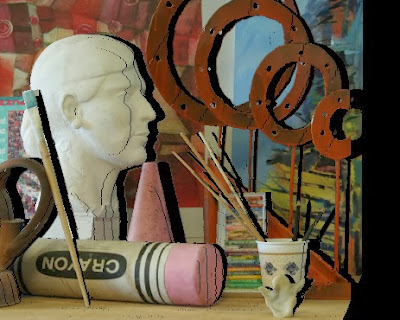
Here's an example:

Left image (after rectification).

Right image (after rectification).

Left disparity map obtained with DMAG2.
Input used for DMAG2:
radius = 32
alpha = 0.9
truncation value (color) = 30
truncation value (gradient) = 10
gamma_p = 32.0
gamma_c = 12.0
disparity tolerance = 0
window radius (occlusion smoothing) = 9
sigma space (occlusion smoothing) = 9.0
sigma color (occlusion smoothing) = 25.5
downsampling ratio = 2
The windows executable (guaranteed to be virus free) is available for free via the
3D Software Page. Please, refer to the 'Help->About' page in the actual program for how to use it.
Source code:
DMAG2 on github.